
Design Experiences (Selected)
Design innovations push the upper bound of robot performance.
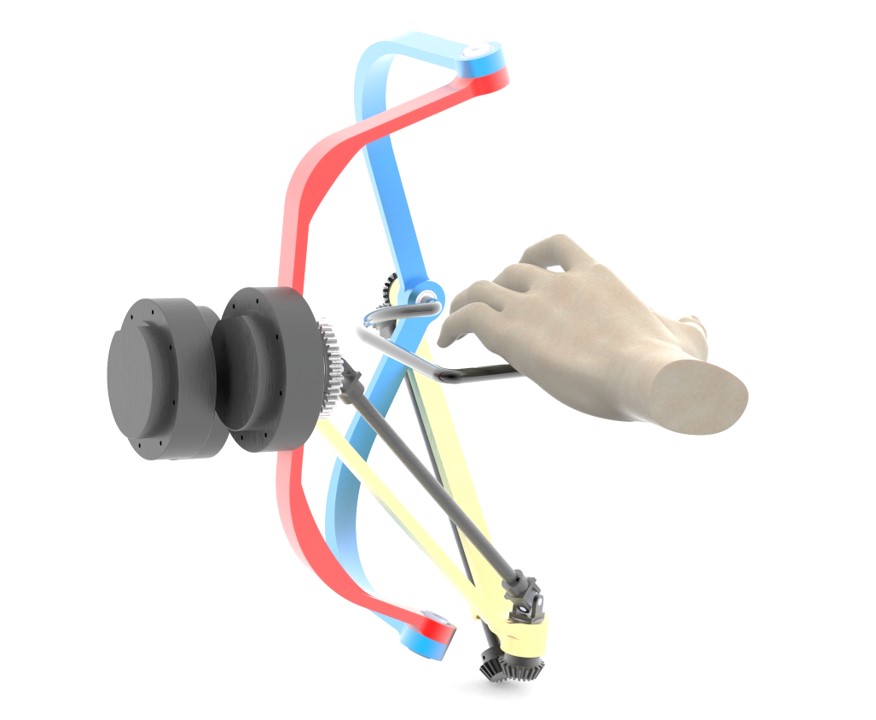
A novel 3-DoF Large Force Haptic Device for the Wrist Motion
Project Description: Personal proposed project, target for the potential application in VR devices, teleoperation master, and exoskeleton.
Towards Agile Maneuver for Terrestrial Robots with Spatial Morphable Inertial Appendage
Project Description: My Ph.D. thesis project, the objective is to propose novel spatial morphable inertial tail designs with enhanced inertial adjustment capability in three-dimension (3D) space and investigate its capability in assisting agile maneuvers for terrestrial robots.

Teleoperated legged-manipulator with replaceable instruments
Project Description: Lab project, we aim at developing a teleoperated legged-manipulator robot system with replaceable instruments for the application in hospitals and logistics warehouses. Now I am the mechanical design group leader.

Humanoid Leg Design Based on Parallel Mechanism
Project Description: Personal proposed project, the objective is to enhance the performance of humanoid leg joints using parallel mechanisms. In the latest design, I propose the utilization of three motors in the hip joint of the leg to collectively drive the hip pitch movement.

Design of a Humanoid Dexterous robot hand
Project Description: Lab project, the objective is to develop an innovative cable-driven approach for humanoid robot finger design, while simultaneously increasing the degree of freedom (DoF) of the robot hand from 13 (previous version) to 22. Additionally, we aim to integrate new angle sensors, haptic sensors, and temperature sensors into the robot hand design.
